
Advanced Navigation 是为商业和国防应用提供高精度惯性导航系统的领先制造商。 我们基于 MEMS(微机电系统)和 FOG(光纤陀螺仪)的导航产品是各种 UAV(无人驾驶飞行器)、UGV(无人驾驶地面飞行器)和 AUV(自动潜航器)应用的理想选择。
通过利用软件定义硬件的功能,每个解决方案都能在 GPS 不可靠的陆地、空中、海上和太空应用中提供无与伦比的功能和卓越性能。
通过广泛的研究、测试和垂直一体化制造,公司已进入机器人、惯性、光子和量子传感、人工智能、水下声学以及 GPS 天线和接收器等深层技术领域。客户选择 Advanced Navigation 是因为其快速的产品交付和无与伦比的现场专业技术。
Advanced Navigation 总部位于澳大利亚悉尼,在全国设有研究和生产设施,并在全球设有办事处,是一家出口全球的澳大利亚制造商。
高性能、紧凑型 IMU 和 AHRS
Certus Mini A MEMS AHRS 传感器
经过 SWaP 优化的战术级 AHRS
"(《世界人权宣言》) 雪特斯迷你 A 在仅重 38 克的坚固封装中提供准确可靠的姿态和航向数据。这款低SWaP传感器采用了Advanced Navigation公司革命性的人工智能融合算法,其精度是传统卡尔曼滤波器的10倍。
这款高性能设备是各种无人机和机器人应用的理想之选,可与 NMEA 0183 和 CANOpen 等行业标准协议以及 ROS 1、ROS 2 和 Ardupilot 无缝兼容。
主要功能
- 0.1° 滚转和俯仰
- 0.8 ° 磁航向
- 坚固耐用的 OEM 选件
了解更多信息: Certus Mini A MEMS AHRS 传感器
Motus 微型 MEMS IMU 传感器
用于无人飞行器的超高精度微型惯性传感器
Motus 是一种微型超高精度 MEMS IMU(惯性测量单元),它将超高精度加速计、陀螺仪和磁力计结合在一起,其惯性性能甚至超过了某些 FOG IMU。
Motus 的体积略大于 1 立方英寸,重量仅为 26 克,非常适合注重 SWaP 的应用,例如使用 VTOL 无人机执行地理定位和激光雷达任务。
 主要功能
主要功能
- 热启动时间:2 秒
- IMU、AHRS 和 INS 选项
- 2 个版本 :OEM 或加固型
了解更多信息: Motus 微型 MEMS IMU
高精度 MEMS GNSS/INS 解决方案
Certus 和 Certus Evo GPS 辅助 INS & AHRS
适用于无人机和机器人的坚固耐用、SWAP 低的定位解决方案
 Certus 和 Certus Evo 这些模块将温度校准加速度计、陀螺仪、磁力计和压力传感器与双天线 RTK GNSS 接收器结合在一起,并采用了基于人工智能的尖端传感器融合算法。
Certus 和 Certus Evo 这些模块将温度校准加速度计、陀螺仪、磁力计和压力传感器与双天线 RTK GNSS 接收器结合在一起,并采用了基于人工智能的尖端传感器融合算法。
Certus 模块采用双天线移动基线 RTK,即使在磁场有问题的环境中,也能为静止和移动的车辆提供高度精确的航向数据。
Certus 和 Certus Evo 是无人机和 USV 勘测、天线和武器平台瞄准以及机器人系统稳定的理想选择。
 主要功能
主要功能
- 双天线航向
- 免费多星座 RTK
- 以太网、CAN、RS232、RS422 和 GPIO 接口
- 内部数据记录
- OEM 或加固型选项
策安科技 Mini N 和 Mini D MEMS GNSS/INS
SWaP 优化的单天线和双天线 GNSS/INS
"(《世界人权宣言》) 雪特斯迷你 N 和 迷你 D 这些传感器采用坚固耐用的封装,提供准确可靠的姿态和航向数据,配备单天线或双天线 GNSS 接收机,具有 L1/L5 多星座 RTK 定位功能,可实现最高精度。低SWaP传感器采用了Advanced Navigation革命性的人工智能融合算法,精度是传统卡尔曼滤波器的10倍。
这些高性能设备是各种无人机和机器人应用的理想之选,与 NMEA 0183 和 CANOpen 等行业标准协议以及 ROS 1、ROS 2 和 Ardupilot 无缝兼容。
主要功能
- 0.1° 滚转和俯仰
- 0.2° (Mini N) / 0.1° (Mini D) GNSS 方位
- 10 毫米 RTK 定位
- 坚固耐用的 OEM 选件


空间 FOG 双 GPS 辅助 INS/AHRS
双天线航向的坚固 FOG INS
"(《世界人权宣言》) 空间 FOG 双 是 Spatial FOG GPS 辅助 INS/AHRS 的双天线移动基线 RTK 变体。无论是静止还是移动,它都能提供高精度的航向输出。三频 Trimble RTK GNSS 接收机可提供高达 8 毫米的定位精度,并支持所有当前和未来的卫星导航系统,以及可提供更高精度定位的 Omnistar 服务。
主要功能
- 双天线航向
- L1/L2 RTK/PPK
- 热启动时间:2 秒
- 体积小、重量轻、功率大
了解更多信息: 空间 FOG 双 GPS 辅助 INS/AHRS
Boreas D90 数字雾灯 INS
战略级 INS,低 SWaP-C
 "(《世界人权宣言》) Boreas D90 Boreas D90 是一款超高精度的战略级 INS,与同类系统相比,在尺寸、重量、功率和成本方面减少了 40%。Boreas D90 是基于 Advanced Navigation 的新型 DFOG(数字光纤陀螺仪)技术发布的首款产品,该技术是两家研究机构 25 年研发的结晶。
"(《世界人权宣言》) Boreas D90 Boreas D90 是一款超高精度的战略级 INS,与同类系统相比,在尺寸、重量、功率和成本方面减少了 40%。Boreas D90 是基于 Advanced Navigation 的新型 DFOG(数字光纤陀螺仪)技术发布的首款产品,该技术是两家研究机构 25 年研发的结晶。
Boreas D90 适用于要求始终可用、超高精度、定位和导航的应用,包括海洋、测量、海底、航空航天、机器人和太空。
主要功能
- 双天线航向
- GPS L1、L2,GLONASS L1、L2,GALILEO E1、E5b,北斗 B1、B2,RTK/PPK
- 热启动时间:2 秒
- 体积小、重量轻、功率大
了解更多信息: Boreas D90 数字雾灯 INS
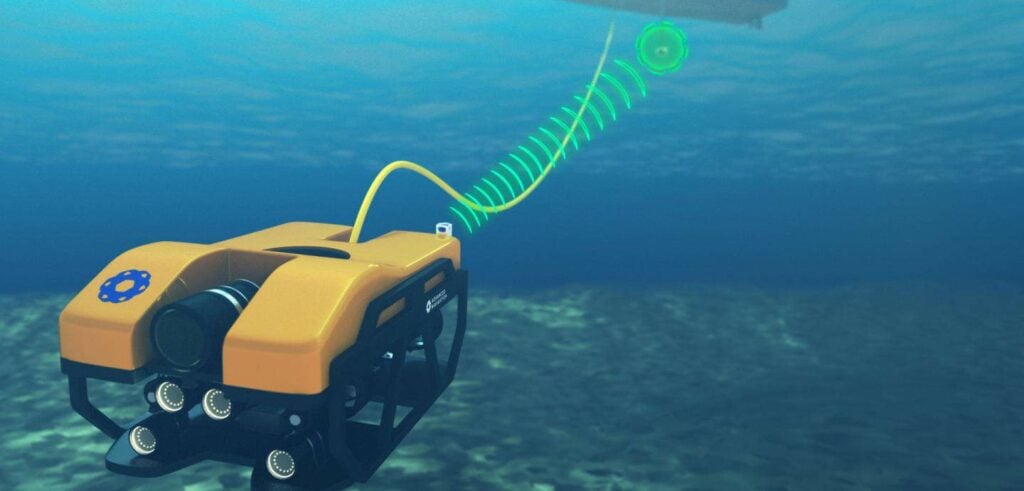
Subsonus 水下声学定位系统
用于 AUV 和 ROV 的高精度微型 USBL
 Subsonus 是新一代 USBL 水下声学定位系统,结合了业界领先的八通道工厂校准水听器阵列和内部紧耦合 INS。它能够在最深 1000 米的水下工作,将声学位置和多普勒速度与工厂校准的惯性传感器和深度传感器相结合,提供高精度的位置、速度和航向输出。
Subsonus 是新一代 USBL 水下声学定位系统,结合了业界领先的八通道工厂校准水听器阵列和内部紧耦合 INS。它能够在最深 1000 米的水下工作,将声学位置和多普勒速度与工厂校准的惯性传感器和深度传感器相结合,提供高精度的位置、速度和航向输出。
Subsonus 是自动潜航器(AUV)和遥控潜水器(ROV)的站位保持、控制和海底勘测应用的理想选择。
主要功能
- 声速传感器
- 非常小的尺寸、重量和功率
- 多路径抑制
- 声学调制解调器
- 综合 INS
- 声速传感器
了解更多信息: Subsonus 水下声学定位系统
Subsonus Tag 声学定位应答器
用于海底遥感和跟踪的低成本传感器
 标签 是一种低成本声学定位转发器,专为与 Subsonus USBL 配合使用而设计。这款密封装置配有集成电池、无线充电和低功耗耐压电子纸显示屏。一个表面 Subsonus 装置最多可跟踪 65,000 个标签,每个标签一次充电可在 1000 米和 2000 米深的范围内工作长达 18 个月。
标签 是一种低成本声学定位转发器,专为与 Subsonus USBL 配合使用而设计。这款密封装置配有集成电池、无线充电和低功耗耐压电子纸显示屏。一个表面 Subsonus 装置最多可跟踪 65,000 个标签,每个标签一次充电可在 1000 米和 2000 米深的范围内工作长达 18 个月。
Subsonus Tag 是位置、方向、航向和温度遥感以及水下无人潜水器(如自动潜航器和遥控潜水器)跟踪的理想选择。
主要功能
- 18 个月电池寿命
- 非常小的尺寸、重量和功率
- 无需维护
- 成本效益
- 集成显示屏
了解更多信息: Subsonus Tag 声学定位应答器
后期处理软件
 Kinematica 后期处理软件
Kinematica 后期处理软件
基于网络的 GNSS/INS 后处理软件
运动学a 是基于网络的 GNSS/INS 后处理软件,用于处理来自我们任何 GNSS/INS 产品的原始 GNSS 和惯性数据。
与标准实时 GNSS 相比,Kinematic GNSS 后处理可将定位精度提高多达 200 倍。Kinematica 软件可自动下载最近的 RINEX 基站数据,并输出精确度为 8 毫米的位置。
Kinematica 利用时间上的前瞻性和后瞻性来填补卫星中断,并补偿通常会影响实时解决方案的误差。它还支持松散和紧密耦合的 GNSS/INS 处理,可在两者之间自动切换,以便在当时的条件下提供最佳精度结果。
非常适合对测量、激光雷达和航空摄影应用中获取的数据进行后处理。
了解更多信息: Kinematica 后期处理软件





评价
目前还没有评价