


Deep Trekker 设计和制造的坚固耐用的水下遥控潜水器在全球范围内广泛应用于国防、公共安全、水产养殖、能源、研究和海洋基础设施等领域。经过十多年的实地验证,该公司是紧凑型便携式水下机器人领域最知名的公司之一,专为那些需要可靠工具在具有挑战性的环境中检查、监控和保护关键资产的专业人员而打造。

在 Deep Trekker,支持不仅限于工作时间。无论是故障排除、设置建议还是操作问题,经验丰富的 ROV 专家都能在您需要的时候随时为您提供服务,并随时通过电话或电子邮件进行回复。
购买 Deep Trekker 车辆不仅仅意味着获得设备。这是一种长期的合作伙伴关系,包括直接与设计、制造和支持该技术的人员接触。
我们在现场与客户并肩工作,帮助协调物流,并提供经济实惠的替换零件--无论您的业务发展到哪里,我们都将始终与您保持联系。
 光子探测器
光子探测器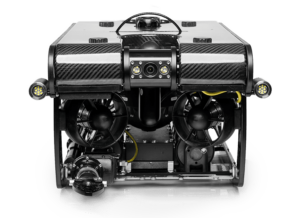 PIVOT ROV
PIVOT ROV 革命号遥控潜水器
革命号遥控潜水器REVOLUTION 遥控飞行器
额定深度达 305 米的先进水下遥控潜水器

"(《世界人权宣言》) 革命 是 Deep Trekker 性能最强的遥控潜水器,专为快速部署和适应苛刻的水下环境而设计。其独特的设计--以旋转头组件为特色--使操作员能够独立地摇动摄像机、声纳和机械手,甚至在使用机载自动稳定装置保持水流位置时也是如此。

该遥控潜水器配备了六个定向推进器,可在包括横向和旋转运动在内的所有方向上提供出色的控制。它可在水下 305 米处执行任务,在需要精细机动性的密闭或开放水域环境中表现出色。
REVOLUTION ROV 可作为四种现成套件之一提供,以满足各种任务要求。
了解更多信息: REVOLUTION 遥控飞行器
PIVOT 遥控飞行器
便携式多功能水下遥控潜水器,水深达 305 米
 "(《世界人权宣言》) PIVOT ROV 在尺寸和动力之间实现了完美平衡,采用了强大的六推进器设计,比 REVOLUTION ROV 小 13.4%,轻 20 磅。
"(《世界人权宣言》) PIVOT ROV 在尺寸和动力之间实现了完美平衡,采用了强大的六推进器设计,比 REVOLUTION ROV 小 13.4%,轻 20 磅。
该多功能便携式系统的深度可达 305 米,是一系列检查、勘测和维护应用的理想之选。
PIVOT 具有独立的旋转相机和工具平台,可从高度稳定的位置进行灵活的成像和操作。相机可旋转 220 度,而工具平台可旋转 97 度。
PIVOT ROV 可作为五种现成套件之一提供,以满足各种任务要求。
了解更多信息: PIVOT 遥控飞行器
PHOTON 遥控飞行器
市场上最坚固、最便携的微型遥控潜水器

光子 是一种超紧凑型遥控潜水器,重 11.6 千克,采用工业级结构和磁耦合驱动器,可在最恶劣的水下条件下实现最高的可靠性和性能。该潜水器由六个定向推进器提供动力,具有很强的机动性,能够横向移动,并采用先进的传感器融合技术进行位置跟踪和自主站位保持。
PHOTON 配备了一台旋转式 4K 摄像机,并可通过 DVL、USBL 和声纳等附加工具和传感器进一步扩展,是检测、现场测绘和 3D 建模等多种用途的理想选择。该系统还可选择锂离子电池或直接供电套件。
PHOTON ROV 有三种现成的套件可供选择,可满足各种任务要求。
所有 PHOTON 套件都包括一个 7 英寸 BRIDGE 集成控制器、重型系绳卷轴、全面的传感器集成和至少 1 年的保修。
了解更多信息: PHOTON 遥控飞行器
产品特点
先进的 ROV 机器人技术实现智能集成
我们先进的水下遥控潜水器由以下设备提供动力 桥梁技术这是一个专有的硬件和软件框架,利用多核处理技术,在我们所有的机器人平台上无缝提供一系列高科技功能。
BRIDGE 是一个将硬件和软件相结合的架构框架,可促进功能扩展,并实现遥控潜水器(ROV)、其控制器以及第三方传感器和工具之间的无缝通信。具有遥控操作能力、先进的数据采集、自主导航等功能。
该框架与 BRIDGE Box 硬件集成,确保控制器与机器人之间的通信畅通无阻。它利用算法确保低延迟,实现实时控制,几乎没有输入延迟。

BRIDGE Box:通过任何设备随时随地进行控制
BRIDGE Box 可以从几乎任何基于 Windows 的设备进行远程控制和数据访问,从而扩展了 Deep Trekker ROV 的功能。操作员可以从控制室、野外卡车、笔记本电脑或平板电脑管理任务,并支持多屏幕显示和实时数据馈送。
该系统具有灵活性,可在各种部署环境中进行实时视频监控、传感器集成和任务控制。无论是在现场还是在办公桌前,BRIDGE Box 都能为远程遥控潜水器操作和数据收集提供实用的界面。
想要使用游戏手柄式控制器?没问题。想在集装箱里装六个显示器?没问题。使用灵活的软件平台设置工作站,该平台将随你的需求而发展。
- 实时流媒体/多租户观看
- 与永久性控制台设置集成
- 远程操作
BRIDGE 控制台:用于遥控潜水器的一体化控制站
BRIDGE 控制台是用于遥控潜水器的综合控制解决方案,配备 18.5 英寸高清触摸屏、可编程按钮、刻度盘和键盘,全部封装在坚固耐用的 Pelican 防风雨外壳中。

该高度便携的系统提供直观的用户界面,操作员可在实时视频馈送的同时监控声纳和地图数据,确保最佳效率和态势感知。该系统非常适合各种复杂的应用,如海底检查、搜索和恢复以及爆炸物处理/地雷反制。
高清数据采集
Deep Trekker 的增强型 4K 摄像机可为水下检测提供清晰、细致的图像,其内置功能包括浊度过滤器、数字变焦、自动白平衡和实时图像校正。通过 BRIDGE 平台进行的高级处理可确保在不同条件下保持稳定的图像质量。
该摄像机是 PHOTON、PIVOT 和 REVOLUTION 系统的标准配置,也可作为 DTG3 的升级组件,在远距离和近距离检查时均可提供高清视觉效果。该摄像机专为水下应用而设计,在清晰度、对比度和精确定位方面均优于普通高清摄像机。


主要功能
- 自动白平衡 - 利用 BRIDGE 的自动色彩校正和白平衡算法,捕捉清晰的图像。
- 数字变焦 - 利用精确的数字变焦功能聚焦于细微之处,无需重新定位遥控潜水器即可进行更仔细的检查。
- 弱光性能 - 高灵敏度相机,专为在黑暗或能见度低的水下环境中捕捉清晰图像而设计。
- 浊度过滤 - 自动图像调整功能可减少浑浊水质的影响,提高低透明度条件下的可见度和效果。
- 箱外摄影测量 - 自动快照和运动模糊抑制等内置工具可让操作员捕捉到高质量的图像,这些图像经过优化,可用于生成精确的 3D 模型。

易于使用的手持式控制器,配有多进纸显示屏
 每个 Deep Trekker ROV 都配有一个轻便的手持控制器,您可以在一个易于阅读的屏幕上查看水下声纳、地图定位和视频画面。
每个 Deep Trekker ROV 都配有一个轻便的手持控制器,您可以在一个易于阅读的屏幕上查看水下声纳、地图定位和视频画面。
控制器还提供 HDMI 输出,可将显示屏扩展到更大的屏幕,如笔记本电脑或显示器。
水下导航技术
深海穿越者任务计划器
使用 Deep Trekker 的任务计划器,精确执行自主水下任务。我们的导航软件包配备了 IMUs、USBL 和 DVL 传感器,可解释实时位置数据,实现无缝自主导航。
只需通过拖放或上传预设坐标来设置航点,然后观察您的遥控潜水器毫不费力地沿着指定路径前进,并沿途记录数据。以优化的效率和更低的操作员工作量进行水下勘测。将声纳、视频和水质传感器与 BRIDGE 软件无缝集成,使操作员能够专注于收集全面的数据,而遥控潜水器则自动按照计划的任务路线前进。
 功能包括
功能包括
- 直观的航点可视化
- 面包屑(智能寻路)
- 高级数据采集
- 可定制的任务简介
死而复生
利用 Deep Trekker 的惯性导航功能,在 GPS 和声学屏蔽的环境中保持精确导航。通过利用板载 IMU 和 DVL,该系统可根据已知速度和航向计算出实时位置估计值,即使外部信号暂时丢失,ROV 也能继续沿着任务路径前进。
 惯性导航可确保在隧道检测、结构下勘测或在钢筋或混凝土附近进行操作时的连续性,因为钢筋或混凝土会阻挡声音信号。当车辆重新与 USBL 或 GPS 参考点取得联系时,其位置将自动得到纠正,从而保持记录轨迹的完整性。
惯性导航可确保在隧道检测、结构下勘测或在钢筋或混凝土附近进行操作时的连续性,因为钢筋或混凝土会阻挡声音信号。当车辆重新与 USBL 或 GPS 参考点取得联系时,其位置将自动得到纠正,从而保持记录轨迹的完整性。
ROV GPS
利用 Deep Trekker 的集成 ROV GPS 模块,实时跟踪潜水器的表面位置。
 GPS 接收器安装在遥控潜水器的顶部,只要潜水器位于水线以上,它就能提供实时的水面定位,并将位置数据传输到 BRIDGE 软件界面。
GPS 接收器安装在遥控潜水器的顶部,只要潜水器位于水线以上,它就能提供实时的水面定位,并将位置数据传输到 BRIDGE 软件界面。
ROV GPS 尤其适用于浅水或近岸作业,能够准确记录检查路线,简化重复勘测或结构监测的返回定位工作流程。
自动距离锁定
距离锁定模块专为我们的 REVOLUTION 和 PIVOT ROV 设计,使潜水器能够与垂直表面(如船体和水下结构)保持一致的距离,而无需不断进行手动调整。该传感器结构紧凑,锁定范围从 0.5 米到 10 米不等,工作深度可达 300 米。
ROV 自动距离锁定该模块易于集成,工作频率为 500kHz CHIRP,非常适合在对持续接近海面至关重要的各种应用中减轻操作员疲劳并提高效率,这些应用包括
- 水电站大坝和核设施检查
- 海堤和船体检查
- 土木工程和基础设施

网络研讨会和现场演示
我们正在举办一系列现场网络研讨会和现场产品演示。加入我们,聆听行业专家的意见,了解我们的最新技术进展。



评价
目前还没有评价