


FarSounder 是三维前视声纳 (FLS) 技术的领先开发商,该技术是 USV(无人水面舰艇)和 ASV(自主水面舰艇)的重要水下导航工具。
他们先进的 水下导航声纳系统 FLS 3D 的特点是更新速度极快,只需一次 ping 即可提供整个 3D 图像。FLS 3D 数据在探测危险、障碍物和浅滩方面具有很高的可靠性,从而提高了安全性和导航能力。该系统还可与船舶的导航控制器集成。

跳转到我们的 三维前视声纳解决方案 >
先进的水下 3D 检测
他们先进的 水下声纳系统 可高度可靠地探测危险、障碍物和浅滩,提高安全性和导航能力。

阿尔戈斯导航声纳系统 该系统采用独特的相控阵技术,更新速度极快,只需一次扫描即可获得整个三维图像,无需等待。这种快速刷新还意味着检测结果不受多径干扰、滚动和俯仰、表面效应以及船只运动的影响。
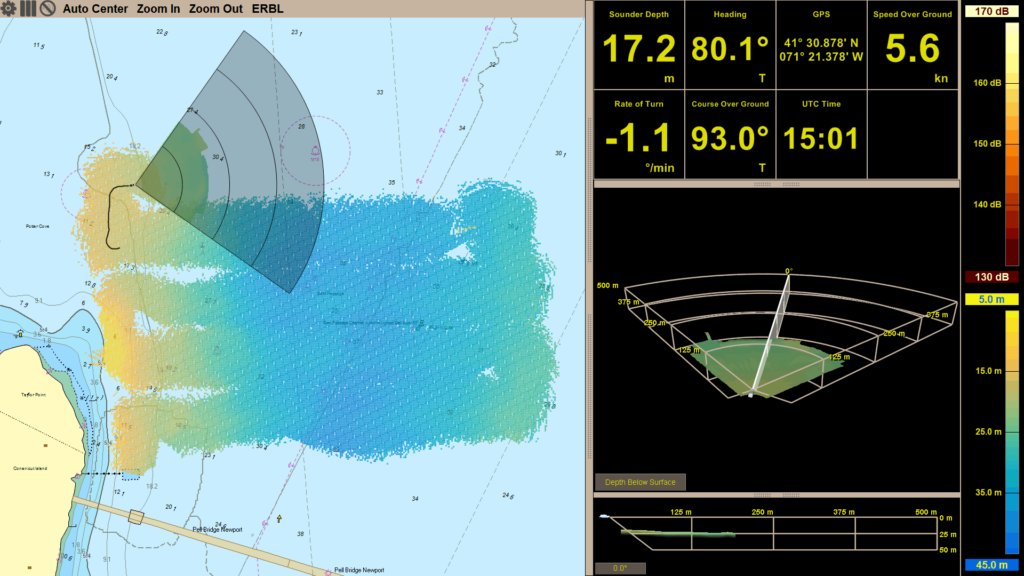
FarSounder 提供多种界面选项,用户可快速、直观地与 Argos 3D 前置声纳采集的数据进行交互。 索纳软件 (Windows桌面应用程序)、SonaSoft LT™(浏览器应用程序)和/或通过网络应用程序接口与第三方集成。
SonaSoft™ LT 用户界面显示集成的 SEA.AI 摄像头检测结果:


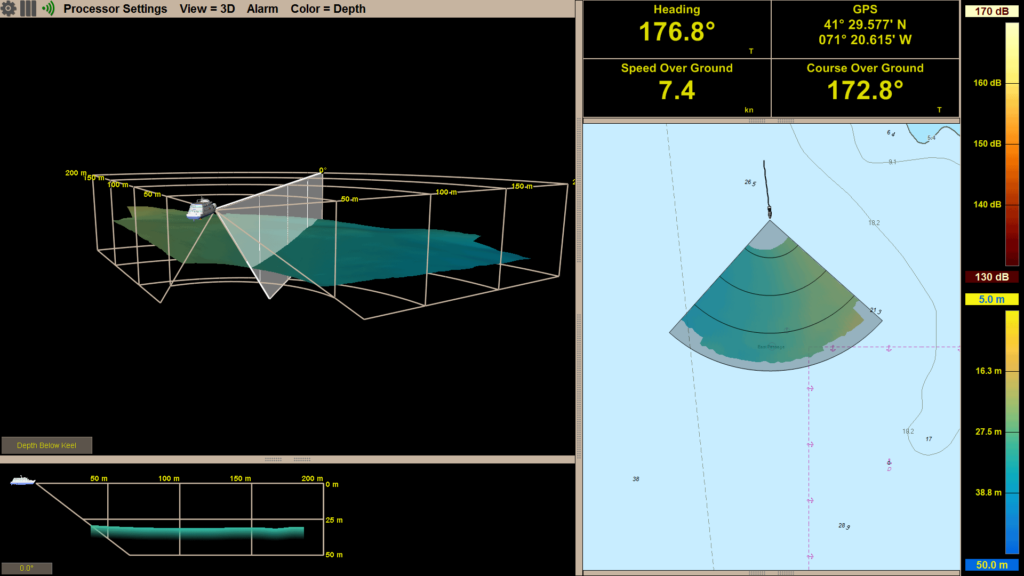
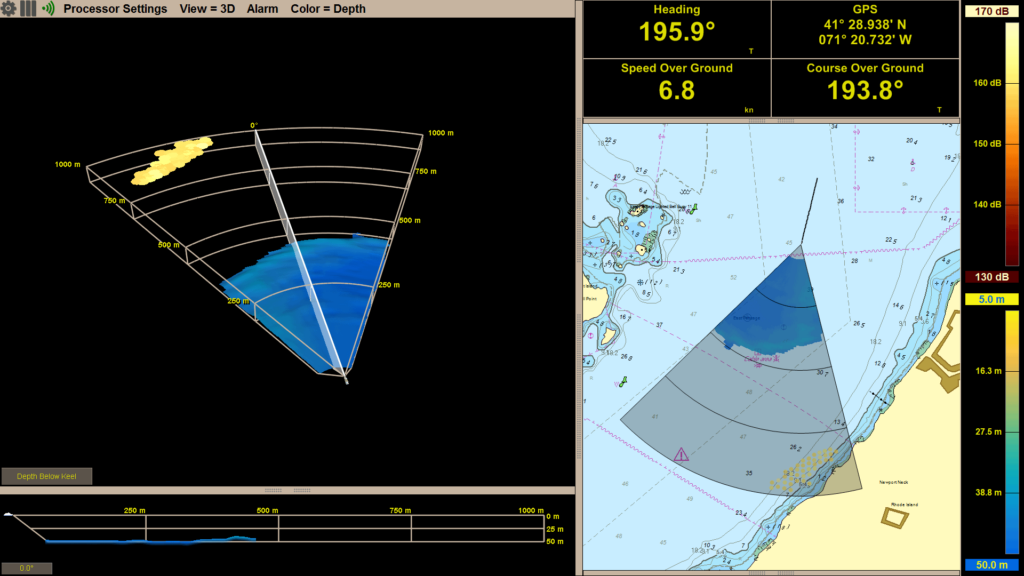
数据既可显示在直观的三维显示屏上,也可叠加在海图(包括 S57/S63 和 C-MAP 专业海图)上,提供一个易于理解的界面,使 USV 能够在未知水域航行。内置的本地历史制图功能允许用户绘制船只最近航行过的海底彩色三维地图。所有 Argos 系统还允许用户定义和设置自动视觉和听觉警报。
对于希望在勘测应用中使用该系统收集的测深数据的项目,也有一个选项。因此,除了水下导航外,数据还可以导出到 QPS Qinsy 勘测软件,以便在 Qinsy 中监测水深和探测到的危险。用户将能够把利用 FarSounder 的前视声纳功能收集的测深数据纳入其工作流程。
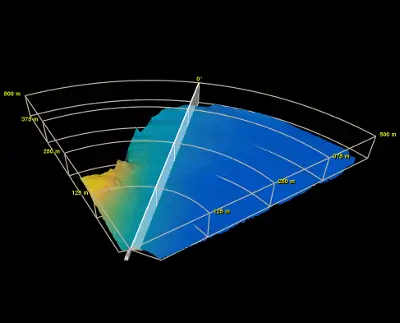
直观的 3D 显示屏
船舶前方导航范围内的三维图像
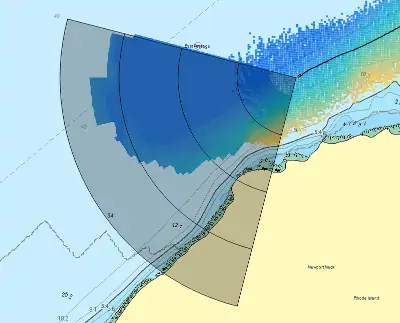
海图声纳
它们通过在海图上显示 FLS 数据,描绘出一幅清晰的画面

固定安装
安装设计固定,无活动部件,适用于多种类型的船只

固定更新率
相控阵技术使 FarSounder 的声纳只需一次探测就能生成整个 3D 图像
我们的 导航声纳系统 是新建系统和改装系统的理想选择,适用于有灯泡和无灯泡的船只。
3D 声纳解决方案
Argos 350 前置声纳系统
用于 USV 的导航声纳

90° 至 350 米范围
"(《世界人权宣言》) Argos 350 前置声纳系统 设计用于长度从 18 米到 40 多米(60 到 130 多英尺)的船只。它能够探测前方 350 米处的危险和障碍物,工作航速可达 18 节。
进行简单的调查
该系统为 USV 操作员提供所需的全部实时声纳信息,使他们能够自信地在暗礁、浅海沉船、冰山和其他各种具有挑战性的海洋环境中航行。除了避障之外,三维声纳数据对于各种测绘和勘测应用也至关重要。
Argos 350 可采用两种不同的安装方式,以满足各种 USV、AUV 和无人驾驶船只的需求--一种是简易固定安装,另一种是在直径为 10 英寸的海箱中采用吊装方式。
更多信息: Argos 350
Argos 500 前视声纳
水下声纳导航系统
120° 至 200 米范围
90° 距离可达 500 米
"(《世界人权宣言》) Argos 500 3D FLS 它能可靠地探测到船只前方 500 米以内的浅滩和水下障碍物、危险和目标。它可以在航速高达 20 节的船上使用。
该系统非常适合需要高精度防撞能力或能够轻松方便地绘制浅水水下环境地图的中型 USV。
短程海底等深线
Argos 500 采用无活动部件的传感器,可轻松集成到新建船舶和改装船舶的船体中,也可内置到定制的第三方升降机中。

配备 Argos 500 系统的 DARPA NOMARS Defiant 原型船(图片来源:Serco North America)
更多信息: Argos 500
Argos 1000 远程 FLS
用于 USV 导航的前向声纳

120° 至 200 米范围
90° 距离可达 500 米
60° 至 1000 米范围
"(《世界人权宣言》) Argos 1000 是我们最强大的 前视声纳系统在船速高达 25 节的情况下,可在船前 1000 米(0.5 海里)处可靠地避免碰撞和探测危险。
该系统非常适合当前和未来的大型无人水面舰艇(USV),使这些平台能够克服传统导航方法的局限性,让操作人员能够驾驶船只通过具有挑战性的环境,同时大大降低碰撞风险。
远距离探测到的海岸线
Argos 1000 的传感器没有活动部件,可以轻松集成到新建和改装船舶的各种船体形状中。它还可以内置到定制的第三方升降机中,以满足用户的特殊要求。
更多信息: Argos 1000 远程 FLS
产品比较
| Argos 350 | Argos 500 | Argos 1000 | |
| 范围 | 100, 200, 350 m | 100, 200, 500 m | 100, 200, 500, 1000 m |
| 视野 | 90° 至 350 米 | 120° 至 200 米 90° 至 500 米 |
120° 至 200 米 90° 至 500 米 60° 至 1000 米 |
| 最大运行速度 | 18 节 | 20 海里 | 25 海里 |
| 最大深度检测 | 50 米(165 英尺) | ||
| 电源要求 | 110/220 V 50/60 赫兹 @~80 瓦 |
110/220 V 50/60 赫兹 @~100 瓦 |
110/220 V 50/60 赫兹 @~120 瓦 |
| 角度精度 | ~1.6° | ||
| 滚动/俯仰稳定 | +/- 20° | ||
| 刷新率 | ~3 Hz 至 ~1 Hz (视范围而定) |
~3 Hz 至 ~0.75 Hz (视范围而定) |
~3 Hz 至 ~0.5 Hz (视范围而定) |




评价
目前还没有评价